上海2024年9月26日 /美通社/ -- 傅利葉自主研發(fā)的新一代通用人形機器人GR-2迎來重磅發(fā)布。立足于"為AI打造最佳具身載體"的產品愿景,GR-2在硬件、設計、開發(fā)框架等多個關鍵環(huán)節(jié)帶來了令人矚目的創(chuàng)新和提升,展現(xiàn)更靈活、更強勁、更開放的特性,滿足各領域開發(fā)者、多元應用場景的需求。
設計全面升級,GRx系列的新里程碑
GR-2在外觀上沿用GR-1的仿生設計語言,同時進一步優(yōu)化全身比例——升級后的身高達到175cm,體重63kg,全身共有53個自由度,單臂運動負載達3kg,能夠完成更復雜的操作。新一代電池容量翻倍,續(xù)航時間延長至2小時。在支持直充的基礎上,增加可拆卸換電方案,充分滿足運動需求。
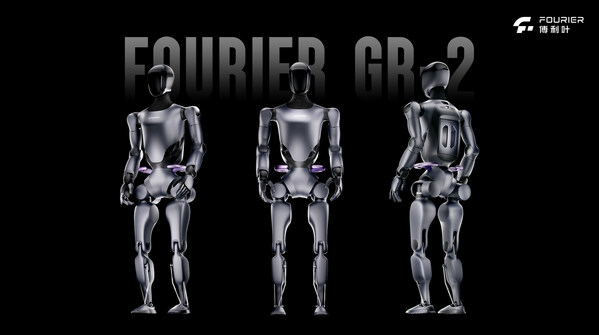
GR-2的整機布局采用內走線設計,將線纜置于機器人內部,不僅提升整體美觀度,而且精簡模塊化適配,降低開發(fā)者外設布置阻礙,同時為場景適配開發(fā)留足空間。為了優(yōu)化控制策略和性能,GR-2的關節(jié)布置由并聯(lián)改為串聯(lián),使得每個關節(jié)的運動可以獨立計算,有利于開發(fā)者部署控制算法,方便調試和維護,降低制造成本。
仿人觸覺靈巧手,更靈活的上肢操作
GR-2在上肢操作的靈活度和精準度方面有明顯提升,主要得益于傅利葉對靈巧手性能的迭代升級。GR-2所搭載的新一代靈巧手,單手自由度由初代的6個增加至12個,完美復刻人手外形及尺寸,同時最大限度地模擬人手的自然運動。
新一代靈巧手")
傅利葉自主研發(fā)新一代靈巧手
新一代靈巧手還搭載了6個陣列式觸覺傳感器及運動控制算法,能夠實時感知抓握力度,調整抓取策略,實現(xiàn)對不同形狀、材質、重量物體的精準力控抓取。
作為人形機器人產業(yè)積極推進商業(yè)化的下一個主戰(zhàn)場,上肢操作仍需通過大量數(shù)據(jù)訓練來實現(xiàn)泛化性,打破專用性能力壁壘。GR-2支持VR遙操作控制、拖拽示教、上位機末端控制等多種上肢示教方式。快速創(chuàng)建動作,記錄上肢運動軌跡、關節(jié)角度、力度、靈巧手運動、觸覺信息等多維度數(shù)據(jù),為采集更多真實訓練數(shù)據(jù)提供有力支持,助力開發(fā)者跨越仿真與現(xiàn)實的差距。
更靈活的上肢操作")
GR-2實現(xiàn)更靈活的上肢操作
執(zhí)行器2.0,更強勁的運動能力
GR-2在外觀結構和運動控制方面實現(xiàn)了更加擬人化的表現(xiàn)。為此,傅利葉量身打造了7款不同型號的FSA執(zhí)行器,分別應用于機器人的髖、踝等關節(jié)處,滿足各個關節(jié)的力矩要求。這些自研執(zhí)行器不僅完美適配機器人的仿生形態(tài),還能有效降低硬件成本。
新一代FSA執(zhí)行器")
傅利葉自主研發(fā)新一代FSA執(zhí)行器
新一代執(zhí)行器為GR-2提供了更強勁的動力,最大關節(jié)峰值扭矩超380N.m。結合完善的執(zhí)行器控制算法,GR-2擁有更強的負載能力和流暢的運動控制。
新版執(zhí)行器采用雙編碼器系統(tǒng),編碼器精度提升了2倍,提供更準確的絕對位置與速度反饋,保證GR-2在執(zhí)行各種動作時的控制精度,實現(xiàn)高動態(tài)響應。
更開放的開發(fā)平臺,加速AI具身落地
傅利葉高度重視開發(fā)者的需求和體驗,在此次產品升級中對原有的開發(fā)平臺進行優(yōu)化,形成一套基于主流編程語言的開發(fā)接口方案。無論是機器人研究學者、工業(yè)自動化工程師還是AI軟件開發(fā)者,都能快速上手,高效定制多樣化的應用程序,實現(xiàn)機器人技術創(chuàng)新。
該方案支持服務器-客戶端模型的算法程序開發(fā),封裝了一系列簡潔易用的API,集成了機器視覺、路徑規(guī)劃、力控反饋等預優(yōu)化的算法模塊,在降低開發(fā)門檻的同時簡化了復雜任務的實現(xiàn)過程,顯著提高開發(fā)效率。目前支持NVIDIA Isaac Lab、ROS、Mujoco、Webots等開源框架。
平臺會提供詳盡的日志記錄與遠程監(jiān)控功能,內置嚴格的安全協(xié)議和故障恢復機制,確保開發(fā)過程安全可靠,并且為開發(fā)者提供全面詳實的文檔資源和快速響應的技術支持。
傅利葉GRx,為AI而生
針對人形機器人本體的未來演進,傅利葉提出了"產品六邊形"概念,圍繞運動智能、靈巧作業(yè)、認知智能、仿生設計、用戶體驗和商業(yè)化應用共六個維度,明確機器人本體的能力標準和發(fā)展方向。

"我們在構思產品的過程中一直在思考,全世界有這么多的最強大腦在做 AI的探索,但它仍需要一個物理容器去承載,"傅利葉創(chuàng)始人兼首席執(zhí)行官顧捷表示。"當人形機器人本體在各個維度都達到最優(yōu),成為六邊形戰(zhàn)士后,它一定會是AI最佳的具身選擇。這里的AI不僅限于大模型,還包括機器人感知、決策、執(zhí)行的全過程。"
傅利葉GRx系列致力于為其合作生態(tài)中的科研院校、頭部企業(yè)、場景開發(fā)者和終端客戶,打造更擬人、更通用、更友好的雙足人形機器人,促進AI與物理世界的緊密融合,實現(xiàn)真正的人機共生。